Vierbeiner, die sich im Schritt bewegen und langsam schneller werden, fallen irgendwann automatisch in den Trab. Der Grund dafür ist, dass es mehr Energie bräuchte, nicht die Gangart zu wechseln. Dieser Zusammenhang wurde schon vor mehr als 40 Jahren entdeckt. Nun ist es Alin Albu-Schäffer, Professor für Sensorbasierte Robotersysteme und intelligente Assistenzsysteme an der TUM, gelungen, die Methode auf die Bewegung von Robotern zu übertragen.
Experten sprechen von intrinsischer Dynamik, die Menschen und Tiere für ihre energie-effiziente Bewegungen nutzen. Sie passen zum Beispiel die Steifigkeiten ihrer Muskeln an, wenn sie auf einem härteren Untergrund laufen. Diese „intrinsischen“ Anpassungen passieren automatisch und sind schwer zu identifizieren, sowohl im Menschen als auch in komplexen Roboter-Systemen.
Das Tool filtert die ökonomischsten Bewegungen heraus
Doch durch ein neues Tool wird dies möglich. Entwickelt hat es ein Team der TUM um Prof. Albu-Schäffer: „Uns ist es erstmals gelungen, diese intrinsischen hocheffizienten Bewegungen berechenbar zu machen. Mit dem Tool ist es möglich herauszufinden, welche Bewegungen eines Systems besonders ökonomisch sind.“
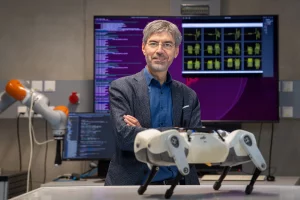
Ein wichtiges Testobjekt ist BERT, ein vierbeiniger Roboter, der aussieht wie ein kleiner Hund. Albu-Schäffer hat BERT am Deutschen Zentrum für Luft- und Raumfahrt (DLR) entworfen. Diese Forschung mit dem Fokus auf „effiziente und vielseitige Fortbewegung mit Beinen“ wird über einen ERC Advanced Grant durch die EU gefördert.
Die Forschenden identifizierten sechs Bewegungsmuster für BERT, die Prof. Albu-Schäffer als besonders mühelos beschreibt und die in einer Welt ohne Reibung keinerlei Energie bräuchten. Sie entsprechen teilweise bekannten Gangarten von Vierbeinern, wie etwa Gehen, Trab oder Hüpfen. „Wir haben damit die Hypothese bestätigt, dass effiziente Gangarten durch Ausnutzung natürlicher Schwingungsmuster realisiert werden können“, erläutert Prof. Albu-Schäffer, der zudem im Munich Institute of Robotics and Machine Intelligence (MIRMI) engagiert ist.
Mit dem exakten Timing Eigenschwingungen treffen
Um diese Bewegungen in einem realen System mit Reibung umzusetzen, wurde nun ein computergesteuerter Regler hinzugefügt, der im richtigen Moment einen Impuls gibt. „Dies kann man sich ähnlich vorstellen, wie ein Kind, das auf einer Schaukel sitzt und am höchsten Punkt einen Energieimpuls durch seine Eltern bekommt, die es anschubsen“, erläutert Annika Schmidt aus dem Forschendenteam von Prof. Albu-Schäffer. Mit einem Unterschied: „Der Mensch benötigt zum exakten Timing nicht jede Menge Gleichungen im Kopf – er macht das intuitiv“, sagt die Doktorandin, die sich in den letzten Jahren damit beschäftigt hat, den Robotern den richtigen Rhythmus beizubringen.
In einem Wettrennen zwischen drei BERT-Modellen lässt sich der Erfolg zeigen. Der Roboterhund, der die Methode der intrinsischen Bewegung einprogrammiert bekommen hat, bewegt sich eher hüpfend und viel dynamischer und schneller voran, als seine Geschwister, die auf konventionellere Bewegungsmuster setzen.
Weitere Informationen: https://www.mirmi.tum.de/mirmi/startseite/, https://www.youtube.com/watch?v=_nL1lcI7AcM