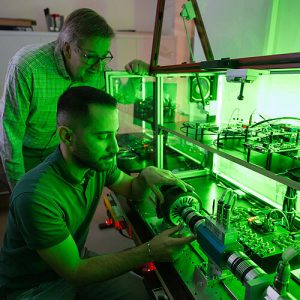
© Oliver Dietze
Um die Temperaturverteilung im Elektromotor in Echtzeit mit KI-Methoden schätzen zu können, sammelte Doktorand Saeed Farzami aus dem Team von Professor Matthias Nienhaus (stehend) an einem selbstentwickelten Teststand Massen von Daten. Hierzu stattete er einen Elektromotor an allen kritischen Stellen mit Sensoren aus, wo Temperatur ins Spiel kommen kann: an verschiedenen Orten in den Wicklungen, im Rotor und auch am Gehäuse.
Mit einem neuen KI-gestützten Verfahren kann das Team um Professor Matthias Nienhaus von der Universität des Saarlandes die Temperaturverteilung in laufenden Elektromotoren erfassen – ohne dass zusätzlich Technik verbaut werden muss. Stattdessen nutzen die Ingenieure vorhandene Antriebsdaten und ein KI-Modell. Das System überwacht das Temperaturprofil im drehenden Motor umfassend in Echtzeit und macht so einen effizienten Betrieb möglich.
Elektrogeräte und Maschinen sollen mit möglichst wenig Material gebaut werden und klein bleiben. Dafür müssen auch ihre Elektromotoren klein und leicht sein – und zugleich viel Leistung bringen. Liefern Motoren viel Power in einem kompakten Gehäuse, werden sie warm. Die Temperaturen steigen dabei im Motor nicht gleichmäßig an. Vielmehr herrschen in den einzelnen Komponenten verschieden hohe Messwerte. Hohe Temperaturen setzen Elektromotoren zu und senken die Lebensdauer und auch ihre Leistung. Weiterlesen






![Abbildung 1: Ansatz zur Quantifizierung erweiterter Verschleißmerkmale der beschichteten Zerspanwerkzeuge [1]](https://werkstoffzeitschrift.de/wp-content/uploads/2026/04/Abbildung-1-300x157.png)